本日1箇所目はAdobe社のGavin Miller氏を訪問しました。
Gavin Miller氏はコンピューターグラフィックスを専門としていて、AdobeのImagination Labで研究員兼副所長を務める一方で、個人的にヘビ型のロボットの研究を行っており、これまでに10近くの様々な機構、形状をしたヘビ型ロボットを制作しています。
専門学術誌での発表もしていて、大学との共同研究も今後予定されています。

今回Gavin Miller氏から直接、4種類の移動形式である、Serpentine locomotionヘビ型移動式、Concertina locomotionアコーディオン式、Rectilinear locomotion直線式、そしてSidewinding locomotionサイドワインダ式のシュミレーションモデルを行い作成されたコンピュータグラフィックスを見せていただきました。
それに加えて、Gavin Miller氏自身のそれぞれの移動形式のロボットの説明と構造についてのお話を伺うことができました。
渡航前、事前にヘビの移動形式の分類やそれぞれの特徴を皆学習しており、
また、彼のこれまで作成したS1~S7までの形状や特徴を学んではいましたが、結婚式での様子といった笑える話であったり、
文献上では知りえない、貴重な話を多くすることができました。
その中には、現在進行中で研究を進めているS8やS9といった新たな構造のヘビ型ロボットや、人工筋肉への発展、クモ型ロボットなどの、自然の生き物をモデルに設計されたロボットといった話がありました。
また、お互いにヘビという形の意義について意見の交換を行うことができ、ドアの開閉を例に今後の研究課題を説明してくださるとともに、いろいろなデザインを試行錯誤する必要性について教えてくださいました。
一方で、へびというシンプルな形である利点も挙げてくださり、シミュレーションのしやすさや、コントロールのしやすさなど、をがその一例です。
また、サンフランシスコや日本で起こりうる地震といった、自然災害の現場での活躍に対する期待についても話し合うことができました。
人命救助や、捜索における、可能性などについても詳しく教えていただき、その適合性についての再確認ができました。
また、後半では実際に、S9やクモ型ロボットを操縦させていただき、実物を用いて各機能や構造の詳しい説明してくださいました。
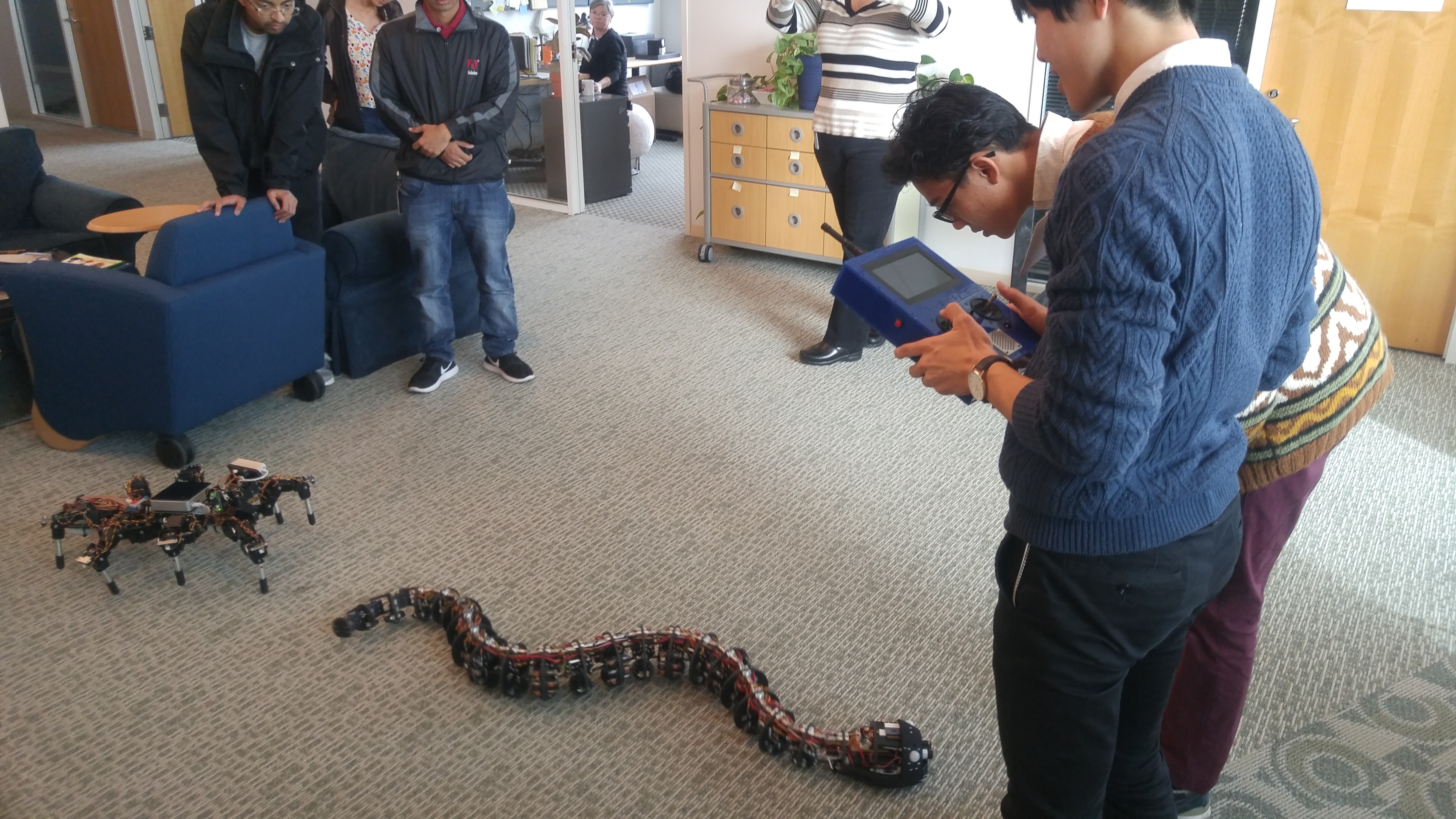
これまでの文献上では、そして話を聞くだけではわからない実物のサイズ感であったり重量、質感といった五感を用いてロボットを感じることができ、私たちは半年以上彼の研究について学習していたので、目の前で動いているロボットたちを見て、一種の感動に近いものを覚えました。時間の関係上、すべての質問をすることができなかったので、今後もメールを通してGavin Miller氏に質問するこのになったので、引き続き彼から様々なことを吸収していきたいです。

本日2箇所目はThync社を訪問しました。
Thync社はMIT、Stanford、Harvardの学生が中心となり、シリコンバレーで立ち上げたウェアラブルデバイスのスタートアップ企業です。この企業は1300万ドルを投資されて設立されました。


今回はSenior SpecialistのVasiliさんにまず、装置の解説をしていただきました。
この装置はtDCS(経頭蓋直流電気刺激方)であり微弱な電波を流すことで、鎮静作用をもたらします。ある1種類の神経伝達物質が間接的に細胞に作用することで効果が生まれるのですが、事前に学習した理論が応用されに役立っていることが確認できました。
その後に実際に体験させていただき、Module、Stripsと呼ばれる2つの装置を額、首筋に付け、スマートフォンのアプリでの操作を行いました。

脳研究を活かしたBtoCの企業はまだまだ日本に少なく、スタートアップとなればほとんどない中、一定の顧客数を抱えていることやまざまなメディアで取り上げられていることも強みであり、企業の勢いが感じられました。
さらに、起業のマインドを伺ったと共に、社名の由来、ロゴ、会社の場所なども事細かに考えられて决定していることも教えていただき、技術面以外の事もディスカッションから探ることができた訪問となりました。
